

Author: Óscar Palacín Domínguez, Robotics and Automation Researcher at Eurecat - Centro Tecnológico de Catalunya
Automated dismantling for safer End-of-Life EV batteries
The unprecedented growth of the electric vehicle (EV) market presents a sustainability imperative: creating asafe, efficient, and cost-effective method for handling End-of-Life (EoL) Lithium-ion batteries (LIBs). BatteReverse partners from the Robotics Group at Eurecat-Centro Tecnológico de Catalunya have created a prototype for automated battery dismantling and sorting, a process that is often costly because it relies on manual labour, and could be dangerous to humans. This system automates the most hazardous and repetitive steps, following robotics 4Ds (Dull, dirty, dangerous and dear); acting as the critical gateway for all subsequent sorting and recycling efforts.
The core objectives of the automated dismantling process are rooted in safety, efficiency, and material value preservation:
- De-risking the process: The foremost goal is to drastically reduce human exposure to the significant occupational hazards present in EoL battery handling. These risks include residual high voltage, potential for thermal runaway, and exposure tocorrosive or toxic chemicals from damaged cells.
- Enhancing throughput and consistency: Automating repetitive, time-consuming tasks ensures consistency and precision that is unachievable with manual labor, thereby speeding up the overall disassembly line and making high-volume processing feasible.
- Enabling selective dismantling: By non-destructively removing the outer casing, the process facilitates the preservation of high-value internal components (modules, bus bars, BMS) for Second Life applications or high-purity direct recycling streams, maximising the economic and environmental return.
Robotic unscrewing and lid removal
BatteReverse has also developed aprototype for automated lid removal and unscrewing tasks, as theseare the first major barriers to accessing the internal components.
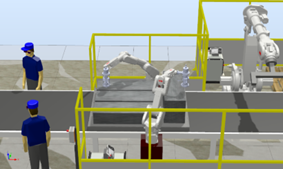
The automated dismantling prototype was built around a flexible robotic systeme quipped with advanced perception systems. This methodology allowed the system to handle the inherent design variability found across different EV battery models, a major bottleneck for conventional automation.
The perception system provides the essential intelligence for the robot to operate autonomously:
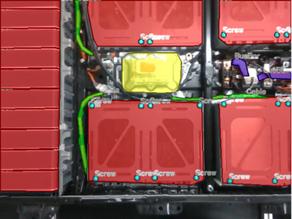
- 3D Localisation: Using RGB-Dsensors, combining color and depth data, the system accurately locates the pose, spatial position and orientation, of every fastener (i.e., screw, bolt, or stud) on the battery lid.
- Screw Tracking and Identification: Before the robot begins its work, an AI-based vision algorithm identifies and assigns a unique digital identifier to every detectable fastener. This allows the system to generate a digital screw map, which is then used by the robot controller to define the optimal unscrewing sequence.
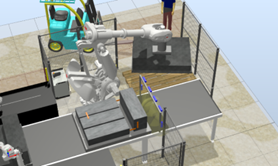
A medium-payload collaborative robot equipped with a specialised electrical screwdriver and RGB-D camera acts as the main manipulator for the unscrewing process. Integrated force-torque sensors provide essential tactile feedback, allowing the robot to precisely control and apply the correct torque. This prevents stripping fastener heads or damaging the surrounding metal, a common issue when manually disassembling corroded or heavily torqued parts.

The unscrewing sequence is executed entirely by the robotic system,following a tight, logged loop:
- Map Generation: The vision system delivers the 3D coordinates and unique ID for the next target screw.
- Adaptive Motion: The robot moves the screwdriver to the exact position, compensating for minor misalignments.
- Torque Control: The robot executes the unscrewing motion while monitoring the force-torque sensor. If the screw is removed, its ID is logged as "removed." If the robot detects a stripped head, based on torque readings, the screw's ID is logged as "unremoved," and the robot proceeds to the next screw.
- Data Output: The final output includes a list of all missing screws (screws expected by the model but not detected visually) and unremoved screws (screws detected but not removed by the robot), along with an overview image marking all identified fasteners. This output is critical for scheduling any necessary final manual intervention.
Once all external fasteners are released, a high-payload industrial robot equipped with a custom vacuum system gripper engages and safely lifts the heavy battery lid.

AI-based visual inspection and component sorting
While this task focuses on the physical act of opening the battery, a related task that BatteReverse focuses on is the creation of a prototype for an AI-based visual inspection for sorting components after the battery is opened.
The clean, predictable, and non-destructive opening provided by the robotic system is essential for the the prototype’s inspection station. This subsequent task uses its own AI-driven vision system, combining high-resolution RGB-D cameras with thermal imaging, to perform a detailed quality and heat control inspection of the exposed internals.
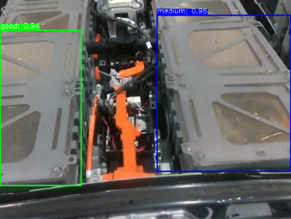
This advanced AI sorter scans the components to identify imperfections like cracks, fire marks, leaks, or physical deformities. A key innovation supporting this task is an in-painting pipeline, a method to synthetically generate realistic damage on training images. This overcomes the challenge of sourcing enough real-world damaged batteries, allowing for robust AI model training.
Ultimately, the AI-based visual inspection system will classify each module as critically damaged, non-critically damaged, or safe, a decision that relies entirely on the successful and precise disassembly performed by the automated dismantling prototype.
The processes demonstrated in BatteReverse’s work on automated dismantling, which concluded in October 2025, represent a vital milestone. They prove that complex, high-risk EV battery disassembly can be automated using intelligent, vision-guided robotics. This successful automation sets the stage for a more ambitious task - combining all processes to create an integrated prototype of an opening, dismantling and sorting station, which will also include an AI-based visual inspection system. This paves the way for more scalable, safe, and efficient battery processing required to manage the next generation of EoL electric vehicles.



